Dokumentace šablony třídy Space_t< Dimension >
Třída realizující N rozměrný prostor. ...
#include <space.h>
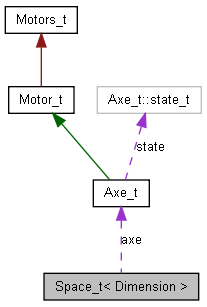
Diagram tříd pro Space_t< Dimension >:
Třídy | |
| class | Point_t |
| Třída realizující bod v N rozměrný prostor. ... | |
Veřejné metody | |
| Space_t () | |
| ~Space_t () | |
| void | setAbs (Point_t point) |
| void | setRel (Point_t point) |
| void | init () |
| void | setMotorId (const int &AxeId, const boost::uint_value_t< 16 >::least newId) |
| Point_t | getMax () const |
| Point_t | getMin () const |
| Point_t | getAct () const |
Chráněné atributy | |
| Axe_t | axe [Dimension] |
| Jednotlivé osy prostoru. | |
Friends | |
| class | boost::serialization::access |
Detailní popis
template<int Dimension>
class Space_t< Dimension >
Třída realizující N rozměrný prostor.
Kód je konkrétně pro 3 rozměrný prostor s vyhlídkou na N rozměrů.
Dokumentace konstruktoru a destruktoru
Dokumentace k metodám
template<int Dimension>
| Space_t< Dimension >::Point_t Space_t< Dimension >::getAct | ( | ) | const [inline] |
Vrátí aktualní polohu hlavy stroje v prostoru.
- Návratová hodnota:
- Bod v prostoru, kde se nachází hlava.
template<int Dimension>
| Space_t< Dimension >::Point_t Space_t< Dimension >::getMax | ( | ) | const [inline] |
Vrátí maximální možnou hodnotu bodu v prostoru.
- Návratová hodnota:
- Maximální možný bod v prostoru.
template<int Dimension>
| Space_t< Dimension >::Point_t Space_t< Dimension >::getMin | ( | ) | const [inline] |
Vrátí minimální možnou hodnotu bodu v prostoru.
- Návratová hodnota:
- Minimální možný bod v prostoru.
template<int Dimension>
| void Space_t< Dimension >::init | ( | ) | [inline] |
Inicializuje nastavení všech motorů.
template<int Dimension>
| void Space_t< Dimension >::setAbs | ( | Space_t< Dimension >::Point_t | point | ) | [inline] |
Nastaví hlavu stroje na absolutní polohu v prostoru.
- Parametry:
-
point Bod v prostoru kam se má pohnout hlava.
template<int Dimension>
| void Space_t< Dimension >::setMotorId | ( | const int & | AxeId, | |
| const boost::uint_value_t< 16 >::least | newId | |||
| ) | [inline] |
Nastaví Id motoru na dané ose.
- Parametry:
-
AxeId Id nastavované osy. newId Nové Id motoru.
template<int Dimension>
| void Space_t< Dimension >::setRel | ( | Space_t< Dimension >::Point_t | point | ) | [inline] |
Nastaví hlavu stroje na relatvní polohu v prostoru.
- Parametry:
-
point Bod v prostoru kam se má pohnout hlava.
Dokumentace k friends
template<int Dimension>
friend class boost::serialization::access [friend] |
Tato třida má přístup z důvodu serializace objektu.
Dokumentace pro tuto třídu byla generována z následujícího souboru:
- libControl3Dp/space.h
