Dokumentace třídy Axe_t
Specializace motoru na Osu. ...
#include <axe.h>
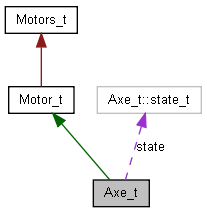
Dědí z bázové třídy Motor_t.
Třídy | |
| struct | state_t |
| Vnitřní reprezentace stavu(nastaveni) osy. | |
Veřejné metody | |
| Axe_t () | |
| void | calibrate () |
| void | goAbs (const double &value) |
| void | goRel (const double &value) |
| void | stop () |
| void | setSpeed (const double &value) |
| void | setAcc (const double &value) |
| void | setForce (const double &value) |
| void | init () |
| double | getMax () const |
| double | getMin () const |
| double | getAct () const |
Friends | |
| class | boost::serialization::access |
Detailní popis
Specializace motoru na Osu.
Obnáší hlavně přidání jednotek a zapouzdření přímého ovládání motoru.
Dokumentace konstruktoru a destruktoru
| Axe_t::Axe_t | ( | ) |
Inicializace Osy. Tedy jejího vnitřního stavu.
Dokumentace k metodám
| void Axe_t::calibrate | ( | ) |
Kalibrace osy. Jedná se o zjištění poměru pro přepočet kroků na délkové jednotky.
| double Axe_t::getAct | ( | ) | const |
Vrací aktualní polohu hlavy.
- Návratová hodnota:
- aktuální možnou polohu hlavy v delkových jednotkách.
| double Axe_t::getMax | ( | ) | const |
Vrací aktualní polohu hlavy.
- Návratová hodnota:
- maximální možnou polohu hlavy v delkových jednotkách.
| double Axe_t::getMin | ( | ) | const |
Vrací aktualní polohu hlavy.
- Návratová hodnota:
- minimální možnou polohu hlavy v delkových jednotkách.
| void Axe_t::goAbs | ( | const double & | value | ) |
Posun na absolutní hodnotu.
- Parametry:
-
value Absolutní délka od počátečního bodu.
| void Axe_t::goRel | ( | const double & | value | ) |
Posun na relativní polohu vzhledem k aktualní..
- Parametry:
-
value Relativní délka od aktualního bodu.
| void Axe_t::init | ( | ) |
Inicializace řídící jednotky motoru. Je prováděno automaticky dle potřeby.
| void Axe_t::setAcc | ( | const double & | value | ) |
Nastavení zrychlení pohybu hlavy.
- Parametry:
-
value Zrychlení hlavy v delkových jednotkách na druhou za sekundu.
| void Axe_t::setForce | ( | const double & | value | ) |
Nastavení síly, kterou se bude hlava rozjíždět/ zastavovat. Má vliv na zrychlení.
- Parametry:
-
value Síla hlavy v Newtonech.
| void Axe_t::setSpeed | ( | const double & | value | ) |
Nastavení rychlosti pohybu hlavy.
- Parametry:
-
value Rychlost hlavy v delkových jednotkách za sekundu.
| void Axe_t::stop | ( | ) |
Zastavení motoru. Předpokládá se použití pouze při stavu nouze.
Dokumentace k friends
friend class boost::serialization::access [friend] |
Tato třida má přístup z důvodu serializace objektu.
Reimplementuje stejnojmenný prvek z Motor_t.
Dokumentace pro tuto třídu byla generována z následujících souborů:
- libControl3Dp/axe.h
- libControl3Dp/axe.cpp
